Robot Learning From Demonstration By
Robot Learning From Demonstration By Information Guide
Overview of Robot Learning From Demonstration By

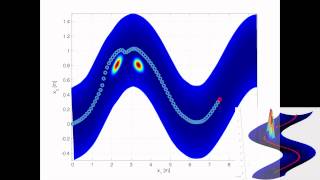
In this research, we propose a user-guided motion planning algorithm in combination with reinforcement Authors: Norman Di Palo and Edward Johns Institution: The We propose a stochastic graph-based framework for a Everything that moves will be autonomous and will embody Method developed by H. Posenauer and W. Ertel, University of Ravensburg-Weingarten. In this video we show examples of how using elastic maps for trajectory generation operates on a pressing skill using a Universal ...
Due to the natural variation in the scene it is difficult to program a fixed motion trajectory for a A brief video covering some of the work currently being done in the brown robotics lab on
Key Details

Developments









Deep Dive
Data is compiled from public records and verified media reports.
Last Updated: June 12, 2026
Summary

Disclaimer: Disclaimer: Details estimates are based on publicly available data, media reports, and financial analysis. Actual numbers may vary.












