Mpc For Trajectory Tracking With
Mpc For Trajectory Tracking With Information Guide
Background of Mpc For Trajectory Tracking With

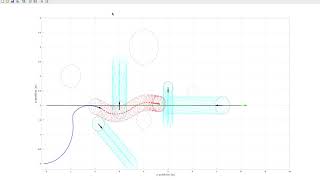
This video presentation describes the work in the paper titled: "Data-Driven Single robot trajectory tracking via model predictive control (MPC) in presence of static obstacles This video showcases a key part of my PhD research on advanced motion planning for mobile robots. Using In this video, I take my PhD research to the next level by demonstrating advanced obstacle avoidance for mobile robots. Abstract: We consider the problem of bridging the gap between geometric Authors: M. A. Santos, A. Ferramosca, G. V. Raffo. This work presents an Economic
Data-Driven Model Predictive Control for Trajectory Tracking with a Robotic Arm
Main Features

History








Detailed Analysis
Data is compiled from public records and verified media reports.
Last Updated: June 12, 2026
Final Thoughts

Disclaimer: Disclaimer: Details estimates are based on publicly available data, media reports, and financial analysis. Actual numbers may vary.












