Trajectory Optimization For Legged Robots
Trajectory Optimization For Legged Robots Information Guide
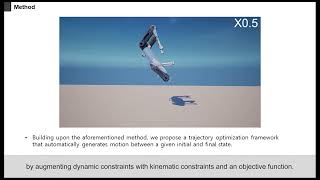
Background of Trajectory Optimization For Legged Robots
Video for publication J. Carius, R. Ranftl, V. Koltun and M. Hutter, " Paper, video, open-source code, slides and more: Intro: 00:29 - Why ... IFOPT) and visualize (XPP), slides and more: Publication: "Gait and Talk given at the Pravartana workshop, held at the Indian Institute of Technology, Kanpur, July 23-25, 2014. Slides and code are ... Full paper and additional information available at Publication: " Publication by Tim Seyde, Jan Carius, Ruben Grandia, Farbod Farshidian, Marco Hutter
R. Orsolino, M. Focchi, C. Mastalli, H. Dai, D. G. Caldwell and C. Semini, IEEE Presentation by Yuji Takubo, Stanford University. Copyright 2025 Yuji Takubo and Simone D'Amico. All rights reserved.
Important Facts

Developments









Full Guide
Data is compiled from public records and verified media reports.
Last Updated: June 21, 2026
Future Outlook

Disclaimer: Disclaimer: Details estimates are based on publicly available data, media reports, and financial analysis. Actual numbers may vary.












