Robust Real Time 6d Active
Robust Real Time 6d Active Information Guide
Background to Robust Real Time 6d Active

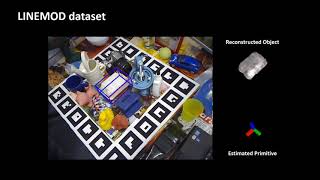
Overcoming the perceptual limitations of hu-manoid robots requires representations exploitable by highly integrable simulation, ... Bowen Wen from Rutgers University specializes in Robotics, Vision, and Deep Learning. We are very happy to share his excellent ... MyungHwan Jeon and Ayoung Kim, PrimA6D: Rotational Primitive Reconstruction for Enhanced and Robust 6D Object Pose Estimation with Stochastic Congruent Sets (BMVC '18) In the past years, the number of applications for mobile robot systems within public areas have been increasing. Employing ... Transferring the motion from a human operator to a humanoid robot is a crucial step to enable robots to learn from and replicate ...
This is just the beginning of what people and physical AI can accomplish together. To recognize business value from collaborative ... In this AI Research Roundup episode, Alex discusses the paper: 'Geometry-Aware Representation Denoising for This video is attached to our HUMANOIDS 2018 paper. Transferring the motion from a human operator to a humanoid robot is a ... Authors: Gerald Ebmer; Adam Loch; Minh Nhat Vu; Roberto Mecca; Germain Haessig; Christian Hartl-Nesic; Markus Vincze; ... Paper: Baichuan Huang, Jingjin Yu, Siddarth Jain Abstract: In this paper, we explore the dynamic ...
Important Facts

Developments









Deep Dive
Data is compiled from public records and verified media reports.
Last Updated: June 20, 2026
Summary

Disclaimer: Disclaimer: Details estimates are based on publicly available data, media reports, and financial analysis. Actual numbers may vary.












