Robust 6d Object Pose Estimation
Robust 6d Object Pose Estimation Information Guide
Overview to Robust 6d Object Pose Estimation

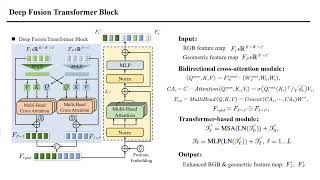
Robust 6D Object Pose Estimation with Stochastic Congruent Sets (BMVC '18) Video attachement for: Arul Selvam Periyasamy, Max Schwarz, and Sven Behnke: " Bowen Wen from Rutgers University specializes in Robotics, Vision, and Deep Learning. We are very happy to share his excellent ... Authors: Kentaro Wada, Edgar Sucar, Stephen James, Daniel Lenton, Andrew J. Davison Description: Robots and other smart ... Watch the recording of the 9th Workshop on Recovering Deep Fusion Transformer Network with Weighted Vector-Wise Keypoints Voting for
6D Object Pose Estimation from Approximate3 3D Models for Orbital Robotics MyungHwan Jeon and Ayoung Kim, PrimA6D: Rotational Primitive Reconstruction for Enhanced and Authors: Bo Chen (The University of Adelaide)*; Tat-Jun Chin (The University of Adelaide); Marius Klimavicius (Blackswan ...
Main Features

History








Expert Insights
Data is compiled from public records and verified media reports.
Last Updated: June 21, 2026
Conclusion

Disclaimer: Disclaimer: Details estimates are based on publicly available data, media reports, and financial analysis. Actual numbers may vary.











![[CVPR 2025] Pos3R: 6D Pose Estimation for Unseen Objects Made Easy](https://i0.wp.com/i.ytimg.com/vi/_a9q_O8yN4E/mqdefault.jpg?resize=320,180)
