Rapid Multi Agent Pathfinding
Rapid Multi Agent Pathfinding Information Guide
Introduction on Rapid Multi Agent Pathfinding

RBE 550: Motion Planning Project Proposal Presentation Team: Dheeraj Bhogisetty, Shiva Surya Lolla and Siyuan Huang ... Theta* for geometric path planning. ORCA for path following with collision avoidance. Ad-hoc deadlock detection mechanism. Short presentation of the paper: Shaull Almagor and Morteza Lahijanian, "Explainable This talk aims to invite you to the forefront of MAPF research directly This is a re-recording of my invited talk at EurMAPF-25, ... The video that describes my research about the Real Time Video 21 in a course on single-agent search. This video discusses the
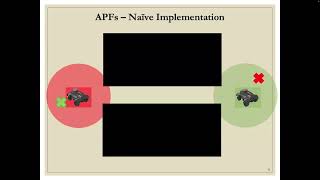
Artificial Potential Fields for Multi-Agent Pathfinding We propose a novel hybrid algorithm, LNS-SAT, that uses a Boolean Satisfiability (SAT) repair engine within a Large ... Real-time procedural navigation system in Unity featuring dynamic map generation, Presented at the 2019 Amazon Research Awards Robotics Symposium. In this talk we describe recent progress in the area of ... AAt-SIPP(m) is an enhancement of AA-SIPP(m) algorithm introduced by Yakovlev and Andreychuk in ...
Key Details

Recent Updates









Full Guide
Data is compiled from public records and verified media reports.
Last Updated: June 10, 2026
Conclusion

Disclaimer: Disclaimer: Details estimates are based on publicly available data, media reports, and financial analysis. Actual numbers may vary.












![[2018 Feb] AAt-SIPP(m) - Multi-agent path finding algorithm. Evaluation on 5 wheeled robots.](https://i0.wp.com/i.ytimg.com/vi/1Jrye5S0ZV8/mqdefault.jpg?resize=320,180)