How much is Point Cloud Generation Using Rtabmap worth? We've researched comprehensive wealth data, income records, and financial insights for Point Cloud Generation Using Rtabmap. Uncover the complete Details breakdown, salary history, and asset portfolio.
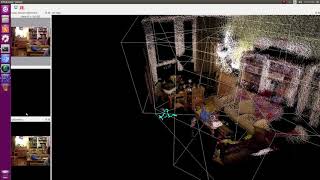
Point Cloud Generation using RTABMAP & ZED Stereo Camera RTABMap generates point cloud with RealSense T265 and D435i Parameters: Voxel grid leaf size 0.05 m Max z: 4 m.
Important Facts
Explore the main sources for Point Cloud Generation Using Rtabmap.
Latest News
Stay updated on Point Cloud Generation Using Rtabmap's newest achievements.
RTAB-Map point cloud using ROI ratios option
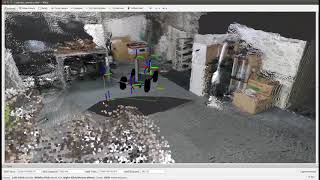
Real-Time 3D Reconstruction using Rtabmap & ZED camera in ROS
Point Cloud Mapping
RTABMap generates point cloud with RealSense T265 and D435i
RTAB-Map 3D map cloud
What are lidar point clouds? How to download and view them on OpenTopography
Getting Started with ROS2 and PCL: An Introduction to Point Clouds for Beginners
I experimented an autonomous moving by using RTAB-Map
Accumulate point clouds from stereo using RTAB SLAM (parameter set 1)
Expert Insights
Data is compiled from public records and verified media reports.
Last Updated: June 21, 2026
Conclusion
For 2026, Point Cloud Generation Using Rtabmap remains one of the most talked-about information profiles. Check back for the newest reports.
Disclaimer: Disclaimer: Details estimates are based on publicly available data, media reports, and financial analysis. Actual numbers may vary.









![Famous [ROS tutorial] RTAB-Map in ROS 101 Net Worth](https://i.ytimg.com/vi/gJz-MWn7jhE/mqdefault.jpg)



![[ROS tutorial] RTAB-Map in ROS 101](https://i0.wp.com/i.ytimg.com/vi/gJz-MWn7jhE/mqdefault.jpg?resize=320,180)








