Point Cloud Generation Using Rtabmap Point Cloud Generation Using Rtabmap
Safe & Secure Download - Verified by Simple Education ERP
Point Cloud Generation Using Rtabmap Point Cloud Generation Using Rtabmap Information Guide
Overview on Point Cloud Generation Using Rtabmap Point Cloud Generation Using Rtabmap

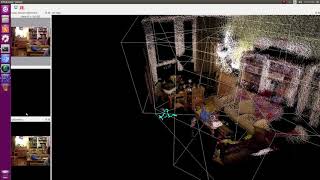
Point Cloud Generation using RTABMAP & ZED Stereo Camera SLAM test results for Intel Realsense 455. Done for the MetAimLab's stereo-stream repo. Major thanks to this github issue that ... In this video, the 3D map of indoor environment is created and saved in the memory SLAM (Simultaneous Localization and Mapping). SLAM problem is to compute an estimate of the agents location and a map of ... The odometry is obtained by fake Lidar (depth sensor of RGDB camera). More ROS Learning Resources: In this video we show how to Navigate
Important Facts

History












Deep Dive
Data is compiled from public records and verified media reports.
Last Updated: June 20, 2026
Summary
![Famous [ROS tutorial] RTAB-Map in ROS 101 Profile](https://i.ytimg.com/vi/gJz-MWn7jhE/mqdefault.jpg)
Disclaimer: Disclaimer: Details estimates are based on publicly available data, media reports, and financial analysis. Actual numbers may vary.