Multi Agent Dynamic Collision Avoidance
Multi Agent Dynamic Collision Avoidance Information Guide
Overview on Multi Agent Dynamic Collision Avoidance

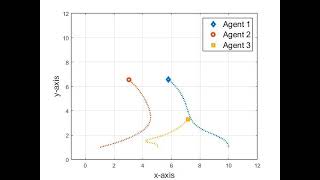
Python Implementation of Reciprocal Velocity Obstacle (RVO) for Paper submitted to the MED 2026. Abstract: Distributed control schemes are essential for scalable Theta* for geometric path planning. ORCA for path following with Deep-Learned Collision Avoidance Policy for Distributed Multi-Agent Navigation (Circle Scene) Deep-Learned Collision Avoidance Policy for Distributed Multi-Agent Navigation (Full) This simulation was created in MATLAB. The animation demonstrates the influence of velocity matching. The red 'X' represents ...
More information available at: www.ros.org/wiki/multi_robot_collision_avoidance. The method used is distributed LQ discrete-time game.
Important Facts

History









Detailed Analysis
Data is compiled from public records and verified media reports.
Last Updated: June 11, 2026
Summary

Disclaimer: Disclaimer: Details estimates are based on publicly available data, media reports, and financial analysis. Actual numbers may vary.






![[Test] Multi-Robot Collision Avoidance using Multi-Agent Reinforcement Learning](https://i0.wp.com/i.ytimg.com/vi/Vcmc3qwXx-E/mqdefault.jpg?resize=320,180)





