Motion Planning With Graph Based
Motion Planning With Graph Based Information Guide
Introduction on Motion Planning With Graph Based

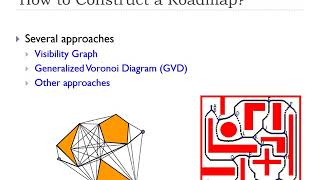
ggcs-anonymous-submission.github.io/ Clipped from the official RSS 2023 ... In this video, I introduce two important concepts in robot path See the other videos in this series: This video ... This work appears in the proceedings of the IEEE International Conference on Robotics and Automation (ICRA), 2017. Authors ... In this work we present new results on autonomous exploration and mapping of underground mines using aerial robots. A flying ... Overview of RRT, RRT*, PRM Includes visuals created from our own implementations Final Project for MIT 6.881 By Violet Killy, ...
This is a video presentation of my final project for MIT - February 16, 2024 Speaker: Russ Tedrake Seminar title: Accompanying video of ICRAI2019 paper "3D Visibility
Core Information

Latest News








Detailed Analysis
Data is compiled from public records and verified media reports.
Last Updated: June 12, 2026
Final Thoughts

Disclaimer: Disclaimer: Details estimates are based on publicly available data, media reports, and financial analysis. Actual numbers may vary.








![Motion Planning Algorithms (RRT, RRT*, PRM) - [MIT 6.881 Final Project]](https://i0.wp.com/i.ytimg.com/vi/gP6MRe_IHFo/mqdefault.jpg?resize=320,180)



