Elbrus Project Nvidia Visual Odometry
Elbrus Project Nvidia Visual Odometry Information Guide
About of Elbrus Project Nvidia Visual Odometry

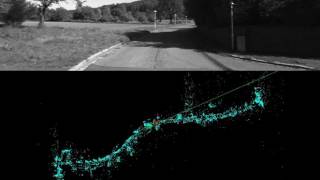
Monocular VO only. No post processing. Runs in real-time mode at 200+fps, image frame in, 6DOF for that frame out. Monocular VO only. NO IMU data is used, video only. No post processing. No loop closure. Runs in real-time mode at 200+fps, ... Monocular VO only. No IMU data is used. No post processing. Runs in real-time mode at 200+fps, image frame in, 6DOF for that ... Monocular VO only. No post processing. No loop closure. Runs in real-time mode at 200+fps, image frame in, 6DOF for that frame ... TLDR: - Only ~35% CPU usage on i9-10900K - ~1000MB memory of ... running on KITTI test sequences: NVStereoNet - an end-to-end stereo depth DNN and
... visual perception components: NVStereoNet - an end-to-end stereo depth DNN and Inside my school and program, I teach you my system to become an AI engineer or freelancer. Life-time access, personal help by ... This video talks about the conceptual differences between
Core Information

Latest News








Full Guide
Data is compiled from public records and verified media reports.
Last Updated: June 12, 2026
Future Outlook

Disclaimer: Disclaimer: Details estimates are based on publicly available data, media reports, and financial analysis. Actual numbers may vary.





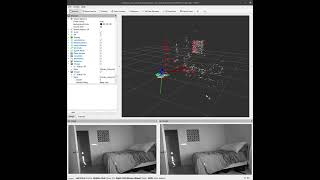
![[ROS2 VIO] NVIDIA Isaac Elbrus Visual SLAM + Intel D435i test in real-world environments](https://i0.wp.com/i.ytimg.com/vi/V24_xtkscjc/mqdefault.jpg?resize=320,180)






