Variable Stiffness Continuum Robot With
Variable Stiffness Continuum Robot With Information Guide
Introduction of Variable Stiffness Continuum Robot With

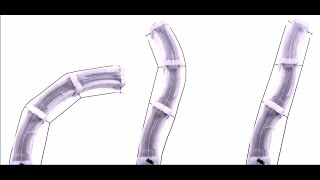
Puspita Triana Dewi, Priyanka Rao, and Jessica Burgner-Kahrs: A Lightweight Modular Segment Design for Tendon-Driven ... Texas Research Showdown - Variable Stiffness Continuum Robot A.B. Clark and N. Rojas, “Assessing the Performance of You may pick something up without realizing how much went into that one motion. For Sven Lilge and Jessica Burgner-Kahrs: Kinetostatic Modeling of Tendon-Driven Parallel This is the video presentation of the paper below. We discovered that using tubes with asymmetric
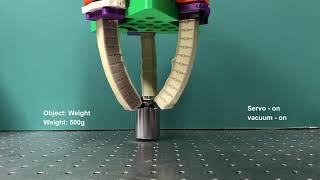
The wheeled humanoid neoDavid is with its 52 Degrees of freedom, 95 brushless dc motors, 184 position and 3 force sensors, ... Design Innovation and Simulation Lab of The Ohio State University developed a soft
Key Details

Developments








Full Guide
Data is compiled from public records and verified media reports.
Last Updated: June 24, 2026
Future Outlook

Disclaimer: Disclaimer: Details estimates are based on publicly available data, media reports, and financial analysis. Actual numbers may vary.












