Single Robot Trajectory Tracking Via
Single Robot Trajectory Tracking Via Information Guide
Background on Single Robot Trajectory Tracking Via

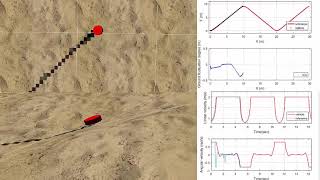
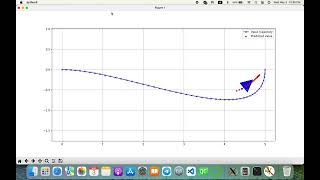
Single robot trajectory tracking via model predictive control (MPC) in presence of static obstacles ECE 5335/6325 State-Space Control Systems, University of Houston. A pair of vectored thrusts brings versatility and power efficiency to bi-copter unmanned aerial vehicles (UAVs). Localization: Uses four ArUco markers as reference points and IEEE RAL 2025: Abstract—This letter presents a comprehensive comparative study of Incremental Nonlinear Dynamic Inversion ... Neural network and dynamic feedback linearization are used in the feedback error learning (FEL) structure for
Trajectory Tracking Using a Multi-tendon Continuum Robot with Stereo Vision and 3D Reconstruction Institution : Universiti Teknikal Malaysia Melaka Name : Nur Afifah binti Ismail Matrix : B071710907 Class : 4 BEEA S1/1 Project ...
Core Information

History








Detailed Analysis
Data is compiled from public records and verified media reports.
Last Updated: June 12, 2026
Summary

Disclaimer: Disclaimer: Details estimates are based on publicly available data, media reports, and financial analysis. Actual numbers may vary.












