Rlbench Task Building Tutorial Target
Rlbench Task Building Tutorial Target Information Guide
Introduction of Rlbench Task Building Tutorial Target

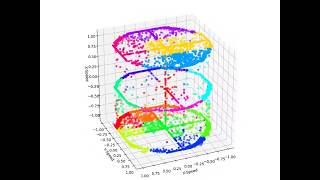
IEEE Robotics and Automation Letters 2020 with presentation at ICRA. Continuous control with gaussian policy(Action bound enforced by tanh) Authors: Stephen James, Zicong Ma, David Rovick Arrojo, Andrew J. Davison. Dyson Robotics Lab, Imperial College London. Vectorised RRT* implementation for following a moving Invited talk at ICRA 2026 Workshop on RL in the Era of IL ( This plot shows the x,y,z speed control inputs that we gave to a UR5 robot while driving the it to do a
Develop the Robotic Control System and the Simulation Environment with ROS, MoveIt and OpenCV Implement latest ... TARS is a cute 4-legged robot from the movie Interstellar. The DQN method on top of a neural network with 285705 trainable ... 04/21/26, Prof. Jeff Zhang, Arizona State University, ""Architecting AI Systems: Efficiency, Reliability, and Automation from ...
Main Features

Recent Updates








Full Guide
Data is compiled from public records and verified media reports.
Last Updated: June 9, 2026
Conclusion

Disclaimer: Disclaimer: Details estimates are based on publicly available data, media reports, and financial analysis. Actual numbers may vary.












![[REFAI Seminar 04/21/26] Architecting AI Systems: Efficiency, Reliability, and Automation](https://i0.wp.com/i.ytimg.com/vi/mtl4t9atVRc/mqdefault.jpg?resize=320,180)