Robust Trajectory Execution For Multi
Robust Trajectory Execution For Multi Information Guide
Overview of Robust Trajectory Execution For Multi
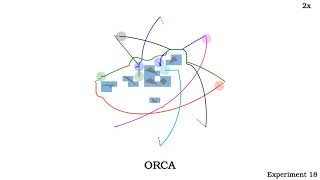
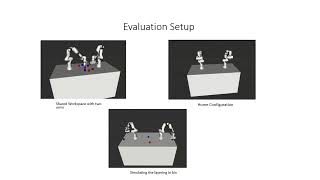
Supplemental video for our paper at DARS 2018. Authors: B. Şenbaşlar, W. Hönig, and N. Ayanian. Abstract: Presentation for IROS 2023 paper: Michael R. Turski, Joseph Norby, and Aaron M. Johnson. "Staged Contact Optimization: ... Modular robotics holds immense potential for space exploration, where reliability, repairability, and reusability are critical for ... Abstract: In hybrid force-velocity control, the robot can use velocity control in some directions to follow a The system successfully navigates between three pallet stations (1m×1m×1m) and a work table, demonstrating the effectiveness ... This is my video presentation for the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). I explain ...
Related papers: Wesley P. Chan, Maram Sakr, Camilo Perez Quintero, Elizabeth Croft, and H.F. Machiel Van der Loos. Towards a ... ICAPS 2015 talk on the paper Michal Čáp, Jiří Vokřínek, Alexander Kleiner. Complete Decentralized Method for On-Line ... Ph. D. defense of Pascal BRAULT. Thesis abstract: One of the major challenges of automated systems is the need to operate ... We demonstrate a provably correct controller for motion control of
Core Information

Recent Updates








Detailed Analysis
Data is compiled from public records and verified media reports.
Last Updated: June 10, 2026
Final Thoughts

Disclaimer: Disclaimer: Details estimates are based on publicly available data, media reports, and financial analysis. Actual numbers may vary.












