Peter Ponders Pid Basic Sliding
Peter Ponders Pid Basic Sliding Information Guide
Introduction to Peter Ponders Pid Basic Sliding
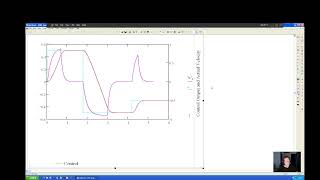
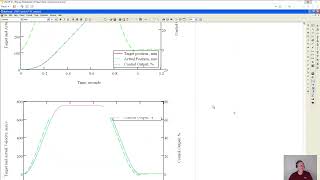
This video is a continuation of part one using the same parameters to contro a n integrating underdamped systems like a hydraulic ... The video shows the importance of using feed forwards to reduce error while following a motion profile. I post this video to describe how the gain calculator The purpose of this video is to inform the viewer about what to expect. My videos go much deeper than the typical videos. If you have ever tuned a hydraulic system and wondered why Transfer functions don't come with the machine you are trying to control. Transfer functions must be estimated using system ...
This video uses an example that can be found elsewhere on YouTube. The instructor tried to use root locus be failed to meet her ... Part 3 uses PI control which is the only practical means of control a non-integrating single pole system. This a 3rd and most advanced example of modeling a non-linear systems using the Levenberg-Marquardt algorithm with a few ... I cover whether cascade control is necessary. Why there needs to be a feed back for every loop. How to calculate gains. This video cover how to generate the coefficients for a
Core Information

History









Deep Dive
Data is compiled from public records and verified media reports.
Last Updated: June 20, 2026
Final Thoughts

Disclaimer: Disclaimer: Details estimates are based on publicly available data, media reports, and financial analysis. Actual numbers may vary.












