Optimizing Robot Paths By Coping
Optimizing Robot Paths By Coping Information Guide
Background of Optimizing Robot Paths By Coping

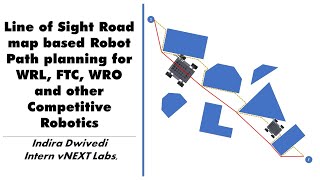
This is a copy of the presentation given by our co-founder, Prof. Ilian Bonev, at Automate 2023. This talk aims at explaining the ... Need to get to your goal quickly? Ensure you plan the right This paper was presented at ICRA 2021. Authors: Daniel Rakita, Bilge Mutlu, Michael Gleicher Abstract: In this paper, we present ... In this video, Our summer Intern, Indira Dwivedi presents the idea of simple line of sight based Roadmap method based ... See the other videos in this series: This video ... This video is part of an online course, Intro to Artificial Intelligence. the course here: ...
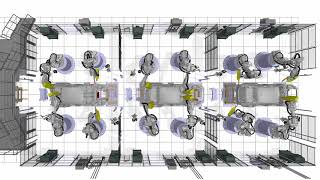
The 4th International Conference on Computing and Data Science Title: Logistics George Konidaris and Daniel Sorin of Duke University have developed a new technology that cuts In this demo, goals for vehicles are randomly created. Our optimal multi-
Core Information

History








Expert Insights
Data is compiled from public records and verified media reports.
Last Updated: June 9, 2026
Final Thoughts

Disclaimer: Disclaimer: Details estimates are based on publicly available data, media reports, and financial analysis. Actual numbers may vary.












