Koopman Operator Based Linear Model
Koopman Operator Based Linear Model Information Guide
Overview on Koopman Operator Based Linear Model

This lecture provides an overview of the use of modern Abstract: Online optimal control of quadruped robots would enable them to adapt to varying inputs and changing conditions in real ... In the previous lecture, we saw how time-delay coordinates combined with SVD can simplify the analysis of complex temporal ... Important references: [1] Williams et al. "A Data–Driven Approximation of the Recorded 05 February 2026. Claire Valva of the California Institute of Technology presents " In this video, we explore how to obtain finite-dimensional representations of the
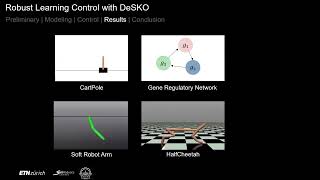
"DeSKO: Stability-Assured Robust Control with a Deep Stochastic Waqas A. Manzoor, Graduate Student, University of Michigan-Dearborn Samir A. Rawashdeh, Ph.D., Associate Professor, ... This is the accompanying video for our paper entitled " Abstract: Online optimal control of quadrupedal robots would enable them to plan their movement in novel scenarios. D. Bruder, B. Gillespie, C. D. Remy, and R. Vasudevan, “
Important Facts

Developments









Deep Dive
Data is compiled from public records and verified media reports.
Last Updated: June 24, 2026
Summary

Disclaimer: Disclaimer: Details estimates are based on publicly available data, media reports, and financial analysis. Actual numbers may vary.












