Efficient Multiagent Trajectory Planning With
Efficient Multiagent Trajectory Planning With Information Guide
About on Efficient Multiagent Trajectory Planning With

Status: IEEE International Conference on Robotics and Automation (ICRA) 2020 accepted. * Category: Multi-robot systems ... ICRA 2018 Spotlight Video Interactive Session Tue AM Pod G.4 Authors: Robinson, D. Reed; Mar, Robert T.; Estabridis, Katia; ... Project website: Supplementary Arxiv Report: We propose ... Paul Ladinig, Bernhard Rinner, Stephan Weiss: Time and Energy Optimized Accepted to IEEE Robotics and Automation Letters! IEEE: arXiv: ... Status: Accepted for publication in IEEE Robotics and Automation Letters (RA-L) □Full title: DMVC-Tracker: Distributed ...
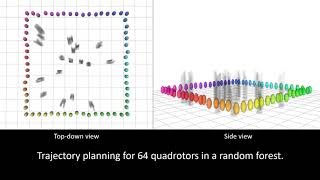
This video presents the simulation of an efficientmulti-agent An Effective Framework for Near-Optimal Multi-Robot Path Planning ICRA2024 submission code: paper: the same name in arxiv Title-Asynchronous Spatial ...
Main Features
Developments










Full Guide
Data is compiled from public records and verified media reports.
Last Updated: June 12, 2026
Final Thoughts

Disclaimer: Disclaimer: Details estimates are based on publicly available data, media reports, and financial analysis. Actual numbers may vary.






![[Accepted to IEEE RA-L] MIGHTY: Hermite Spline-based Efficient Trajectory Planning](https://i0.wp.com/i.ytimg.com/vi/Pvb-VPUdLvg/mqdefault.jpg?resize=320,180)





