Efficient Mixed Integer Trajectory Planning Efficient Mixed Integer Trajectory Planning
Safe & Secure Download - Verified by Simple Education ERP
Efficient Mixed Integer Trajectory Planning Efficient Mixed Integer Trajectory Planning Information Guide
About of Efficient Mixed Integer Trajectory Planning Efficient Mixed Integer Trajectory Planning

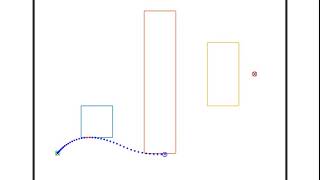
Reference: M. Dabhi, V. R. Desaraju, and N. Michael, “ Avoiding all past locations of the obstacle may be an overly restrictive approach. Here the vehicle quickly becomes separated ... PDF: Danny Driess, Ozgur Oguz, Jung-Su Ha, Marc Toussaint ... TU Delft Delft Center for Systems and Control (DCSC) Colloquia Series – Recording Welcome to the official ... The deadlock problem observed in example 1 is avoided in this situation by remembering the objects past positions, and avoiding ... Travel to 1941 and meet Dr. George Dantzig, the Father of Optimization, whose work during World War II led to the creation of ...
Our next benchmark is that of the dexterous robot grasping problem we model this problem as a The success of a "memoryless" approach to the sinusoidal obstacle depends on parameters such as the frequency and size of the ... An Effective Framework for Near-Optimal Multi-Robot Path Planning Video accompanying the paper presented at ISER 2012 Experimental Multi-Vehicle ICRA 2018 Spotlight Video Interactive Session Wed PM Pod H.4 Authors: Aceituno-Cabezas, Bernardo; Mastalli, Carlos; Dai, ... Accompanying video to the paper: M. R. O. A. Maximo, C. H. C. Ribeiro, and R. J. M. Afonso, “
Main Features

Developments











Full Guide
Data is compiled from public records and verified media reports.
Last Updated: June 11, 2026
Conclusion

Disclaimer: Disclaimer: Details estimates are based on publicly available data, media reports, and financial analysis. Actual numbers may vary.